Overview
Infrastructure for physical autonomy.
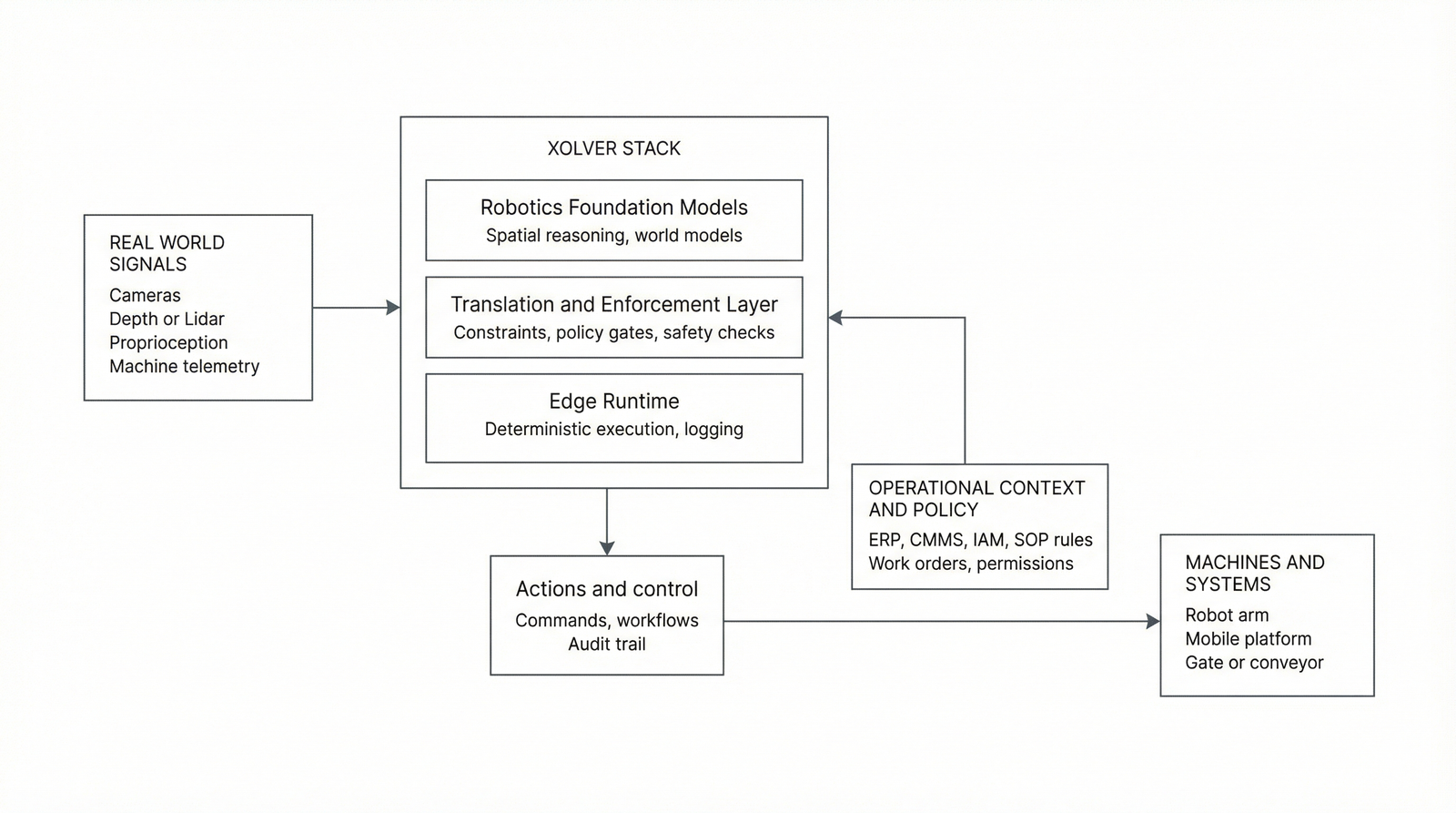
Models propose, enforcement constrains, runtime executes. Xolver separates these roles so perception, validation, and execution do not collapse into a single unchecked loop.
Where ERP Fits
ERP and IAM feed policy and permissions, not perception.
- Models output world state & task intent
- Enforcement outputs allowed actions
- Runtime outputs execution traces